Obróbka wieloosiowa
SprutCAM Robot daje użytkownikowi pełną kontrolę nad pracą kinematyki zewnętrznej. Podczas obróbki wieloosiowej użytkownik posiada możliwość zadawania pozycji początkowej, którą algorytm generowania ścieżki ma wykorzystać do stworzenia ścieżki, indeksować stałe ustawienia osi, manualnie kontrolować pozycję przez wprowadzanie korekt w mapie osi robota lub powierzyć to zadanie dedykowanym algorytmom wybierającym optymalne ustawienie osi i pełną ich kontrolę podczas obróbki detalu. Trajektoria zawsze może zostać skorygowana przez użytkownika z użyciem mapy osi robota co daje wysoką swobodę działań podczas pracy z maszyną.

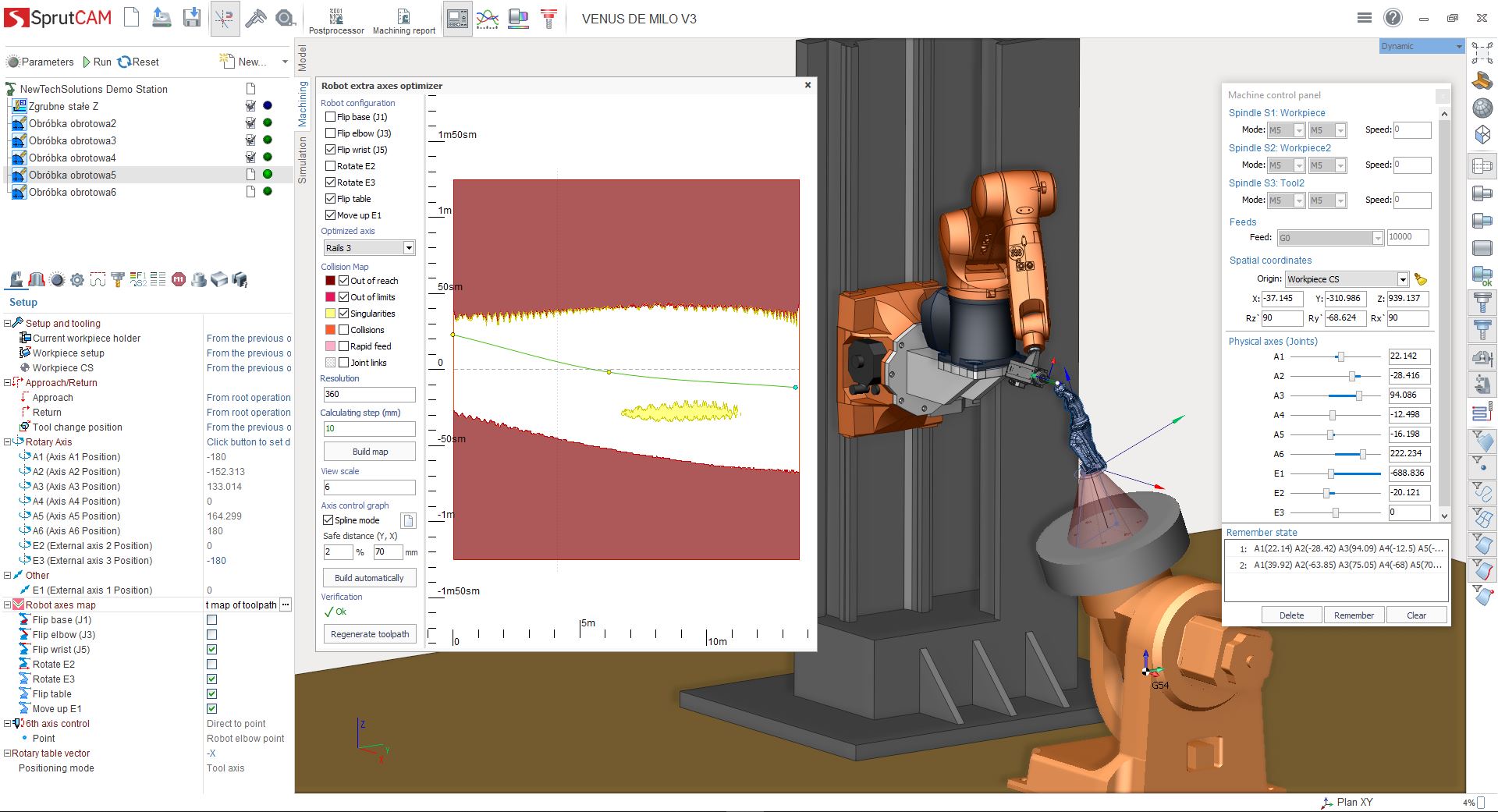

Praca ze stacjami robotowymi nawet 9 osiowymi i więcej jeszcze nigdy nie była tak bezpieczna i efektywna!
Pobierz i testuj najlepszy system do programowania robotów przemysłowych
Wydajne rozwiązanie do programowania robotów umożliwiające szybkie tworzenie złożonych, bezkolizyjnych ruchów 3D w natywnym kodzie robota w 6 i więcej osiach