Symulacja obróbki
Zarówno środowisko symulacyjne jak i (ciągle rozwijające się) dedykowane narzędzia czuwające nad bezpieczeństwem całego procesu obróbczego są cenione przez programistów z całego świata. Intuicyjna i efektywna weryfikacja i korekta zaprogramowanego procesu pod kątem bezpieczeństwa, zwiększenie bezpieczeństwa maszyny i detalu obrabianego, wzrost efektywności planowania, programowania i optymalizacji procesu bez potrzeby zatrzymywania maszyny rzeczywistej i eliminacja błędów na wczesnym etapie symulacji są głównymi przyczynami wyboru oprogramowania SprutCAM przez naszych Klientów.
Od stworzenia czystego projektu do wygenerowania kodu na maszynę użytkownik wspierany jest przez następujące funkcje, które zagwarantują pełną możliwość wykrywania defektów ścieżki i ich eliminację na wczesnym etapie symulacji napisanego programu:
- Algorytm wczesnego wykrywania zagrożeń
- Okno wykresu pracy osi robota
- Mapa osi robota
- Tryb Pełnej symulacji procesu
- Tryb weryfikacji kolorystycznej efektów obróbki

SprutCAM Robot w pełni wspiera aplikacje typu robot trzyma narzędzie, robot trzyma detal oraz aplikacje wielorobotowe.
Algorytm wczesnego wykrywania zagrożeń
Oprogramowanie posiada zaszyte, pracujące w tle algorytmy szybkiej weryfikacji wygenerowanego kodu. Dzięki nim użytkownik posiada pierwsze informacje na temat jakości wygenerowanej ścieżki w kilka sekund po przeliczeniu trajektorii. Szybkie raporty zwracane przez system informują użytkownika czy występują zagrożenia w wygenerowanych ruchach roboczych.
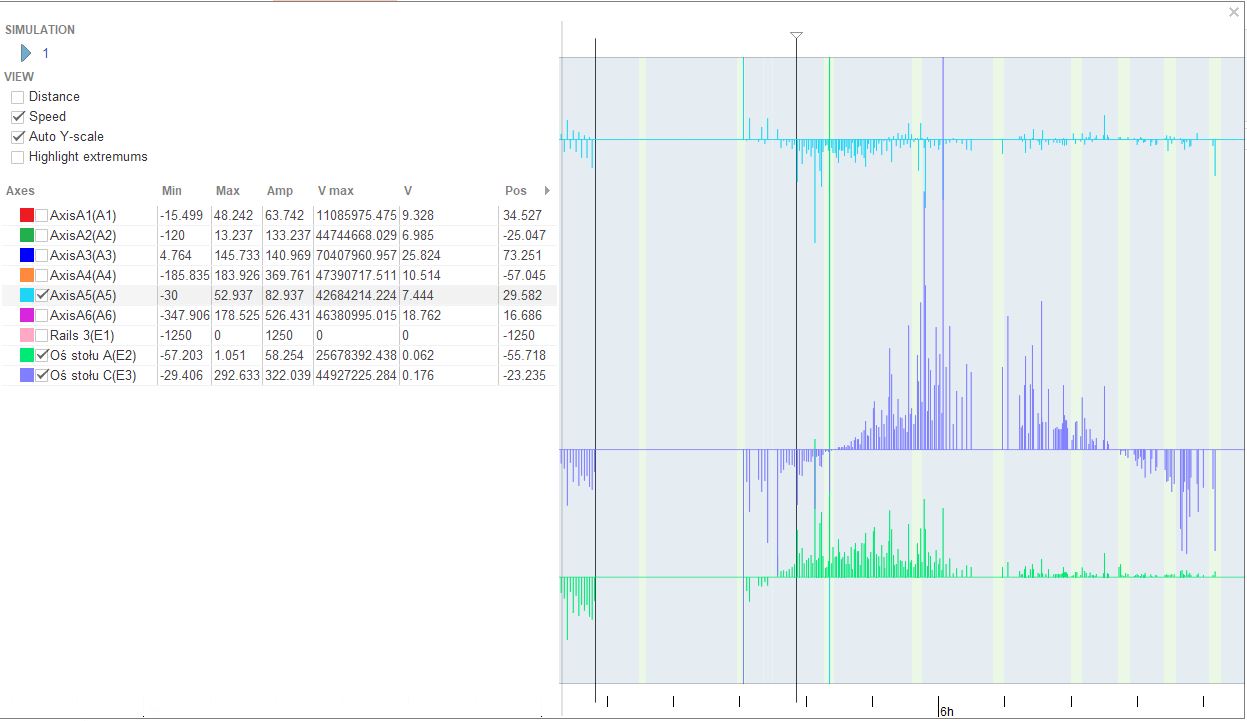
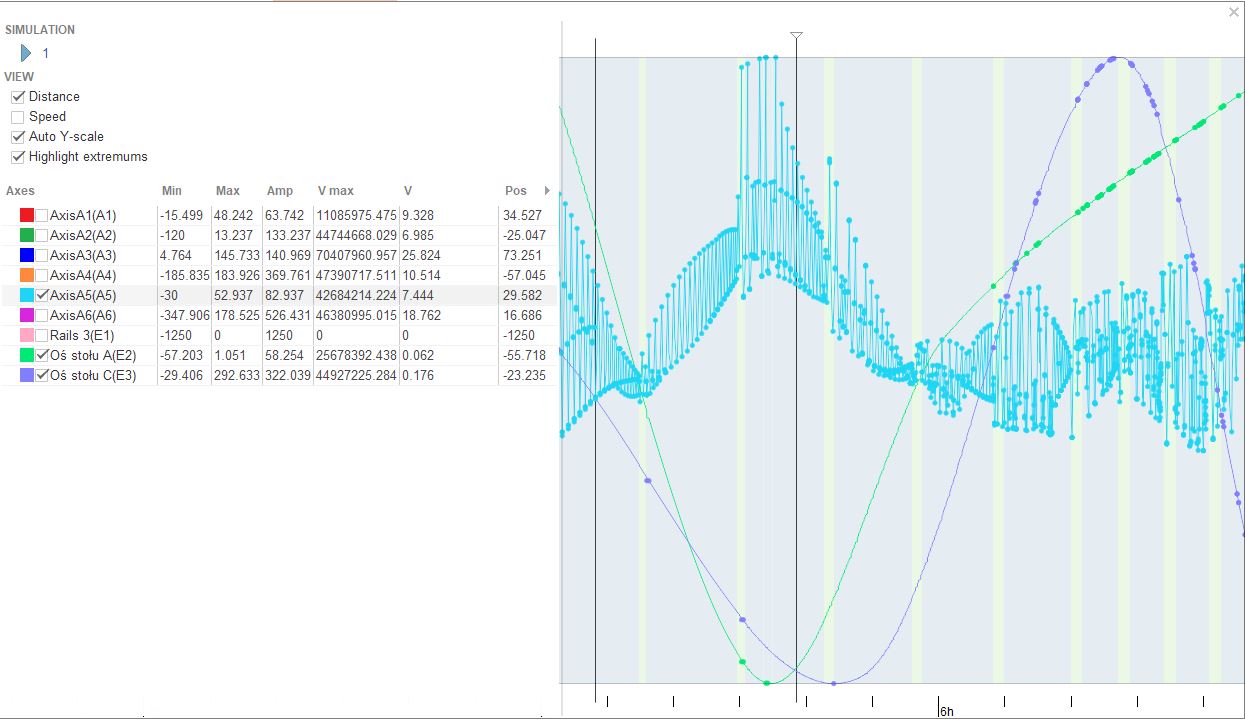
Okno wykresu pracy osi robota
Okno wykresu pracy osi robota jest trybem pozwalającym na szybką analizę ruchów robota, dostarcza ono podstawowych informacji na temat minimalnego i maksymalnego wychylenia osi sterowalnych, amplitudy, prędkości maksymalnej każdej z osi i aktualnej pozycji podczas interaktywnej pracy z wykresem. Dodatkowa funkcja analizy prędkości przegubów pozwala na analizę pracy ramienia i kinematyk zewnętrznych w oparciu o przyspieszenia.
Poprzednie
Następne
Mapa osi robota
Mapa osi robota jest dedykowanym narzędziem do wykrywania wyjść po za zakresy robocze robota, wyjść po za limity osi roboczych, osobliwości występujących w procesie oraz wskazuje potencjalne możliwości ominięcia defektów ścieżki jeżeli jest to możliwe. Mapa osi robota pracuje w oparciu o wprowadzanie poprawki dla 6 osi robota i każdej osi dodatkowej występującej w kinematyce stacji dzięki wykorzystaniu cechy redundancji kinematycznej. Dodatkowe tryby alternatywnych ustawień maszyny zapewniają szybką weryfikację opcjonalnych rozwiązań trajektorii wraz z mapą wynikową. Dzięki opcji naniesienia ruchów szybkich i ruchów łączących ścieżki robocze w operacji użytkownik ma pełne spectrum rozwiązań wykonania procesu w jednym oknie.
Wprowadzone korekty są natychmiastowo aktualizowane po zatwierdzeniu i wpływają na alternatywne rozwiązania pozostałych osi, co zapewnia szybkie, proste i rozbudowane wprowadzanie korekt na wielu osiach bez wpływu na efekt obróbki. Narzędzie znajduje zastosowanie w każdym typie aplikacji i jest szczególnie doceniane na etapie rozmieszczenia elementów stanowiska zrobotyzowanego, szybkiej weryfikacji możliwości wykonania procesu i wprowadzania korekt ścieżki umożliwiającej wykonanie procesu, optymalizację dynamiki procesu i pracy osi.

W trybie mapy osi robota na trajektorię zostają nanoszone kolory, które jednoznacznie wskazują miejsca występujących kolizji, osobliwości, wyjść po za zakresy, czy wyjść po za limity osi.
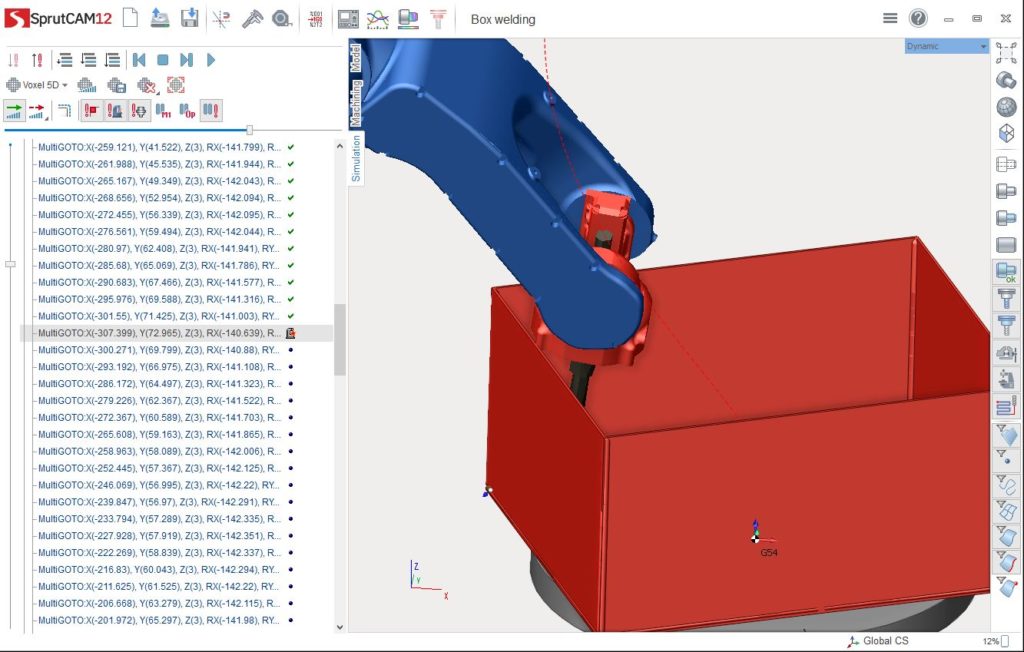
Tryb Pełnej symulacji procesu
Tryb pełnej symulacji zapewnia w pełni automatyczne wykrywanie kolizji narzędzia z detalem podczas ruchów szybkich, detekcje podcięć (w trajektorii występuje podcięcie, które wykracza po za narzucone tolerancje), wyjście po za limity osi, kolizje z elementami występującymi w stacji, kolizji oprawki z modelem obrabianym. Pełna symulacja obejmuje cały wygenerowany proces lub jego wybrane elementy takie jak dojazdy, wszystkie zaprogramowane operacje, przejazdy i odjazdy. Programista w trakcie wykonywania symulacji na bieżąco i po kolei otrzymuje powiadomienia na temat występujących zdarzeń w procesie. Rozbudowany tryb pełnej symulacji pozwala na wygaszanie poszczególnych typów kolizji takich jak, podcięcia, kolizja z maszyną czy kontakt oprawki z modelem, co pozwala na szczegółową analizę pod kątem wybranych typów zdarzeń.
Użytkownik może zatrzymać symulacje na błędzie, na stopie opcjonalnym lub na końcu operacji, w zależności od potrzeby. Suwak prędkości pozwala przyspieszyć symulację w miejscach niewymagających weryfikacji graficznej przez użytkownika, a zwolnić w miejscach szczególnie istotnych.
Jakość symulacji jest zoptymalizowana pod kątem pełnego wykorzystania zasobów komputera bez wpływu na płynność działania. Dla użytkowników wymagających wysokich dokładności została stworzona opcja skalowania jakości symulacji i jakości narzędzia, która pozwala na uwidocznienie szczegółów obróbki. Funkcja skalowania jakości symulacji może zostać dostosowana pod kątem słabszych jednostek obliczeniowych, dzięki czemu użytkownicy każdej stacji roboczej mogą sobie pozwolić na wdrożenie rozwiązania u siebie w zakładzie, bez wpływu na komfort korzystania z oprogramowania.
Symulacja w pełni obsługuje aplikacje substraktywną, gdzie występuje wybieranie materiału, aplikacje addytywne, gdzie następuje pozostawienie materiału i operacje lakierowania, w których występuje pokrycie powierzchni z uwzględnieniem grubości nakładanego materiału.
Tryb weryfikacji kolorystycznej efektów obróbki
Tryb Weryfikacji kolorystycznej pozwala użytkownikowi na szybką analizę materiału, który nie został zebrany podczas obróbki detalu w oparciu o różnice między kształtem obrobionego modelu i modelu docelowego. Użytkownik może definiować progi detekcji materiału poprzez deklarację własnych wartości.
Pobierz i testuj najlepszy system do programowania robotów przemysłowych
Wydajne rozwiązanie do programowania robotów umożliwiające szybkie tworzenie złożonych, bezkolizyjnych ruchów 3D w natywnym kodzie robota w 6 i więcej osiach