Skip to content
Main Menu
Strona główna
Funkcjonalność
Menu Toggle
Cięcie
Druk 3D i 5D
Lakierowanie
Obsługa modelu 3D
Obsługa wielu robotów
Obróbka cieplna
Obróbka wieloosiowa
Spawanie
Symulacja obróbki
Wdrożenie
Pomoc
Kontakt
Pobierz wersję testową
Pobierz wersję testową
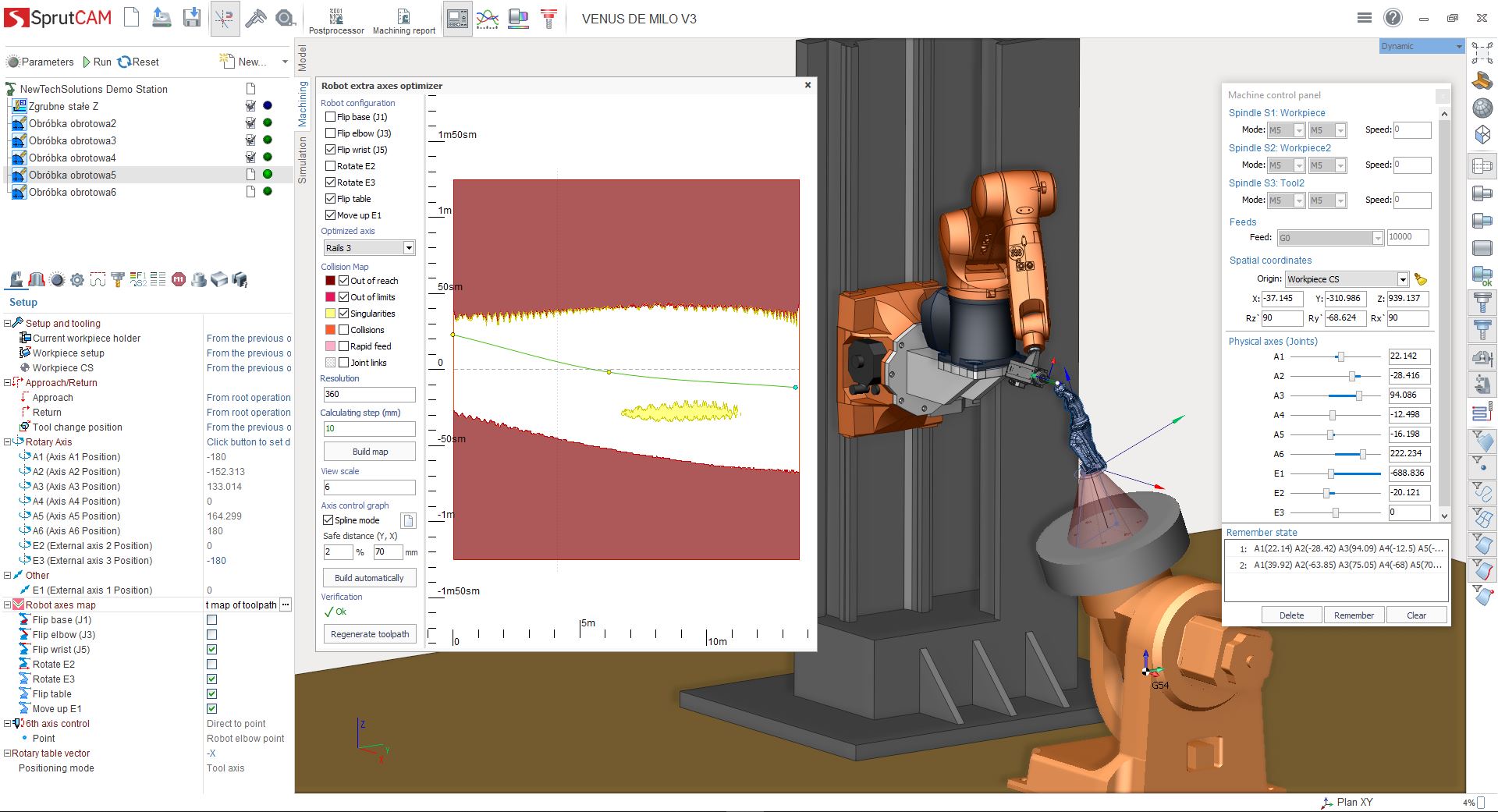
Interface + panel kontroli maszyny + mapa osi robota