Wieloosiowe cięcie na robotach!
Najlepsze rozwiązanie do programowania robotów do przycinania, cięcia, gratowania. Uzyskaj złożone ścieżki narzędzi w krótkim czasie.
Obliczanie ścieżki narzędzia
Natywna 6-osiowa kinematyka robota Lightspeed do obliczania ścieżki narzędzia. Uwzględniono ograniczenia strefy zasięgu, kolizje i osobliwości.
Może być stosowany do różnych zastosowań:
Cięcie plazmowe, laserowe, strumieniem wody; frezowanie; nakładanie kleju, spawanie, obróbka cieplna.
Automatyczne bezkolizyjne podejścia i wycofania:
Dedykowany algorytm do szybkiego obliczania podejścia/wycofania. Ogromna oszczędność czasu.
Szerokie możliwości dostrajania ścieżki narzędzia:
Kontrola wektora narzędzia, edycja splajnu ścieżki narzędzia, regulacja prędkości posuwu, kąty wyprzedzenia i pochylenia, interpolacja i inne.
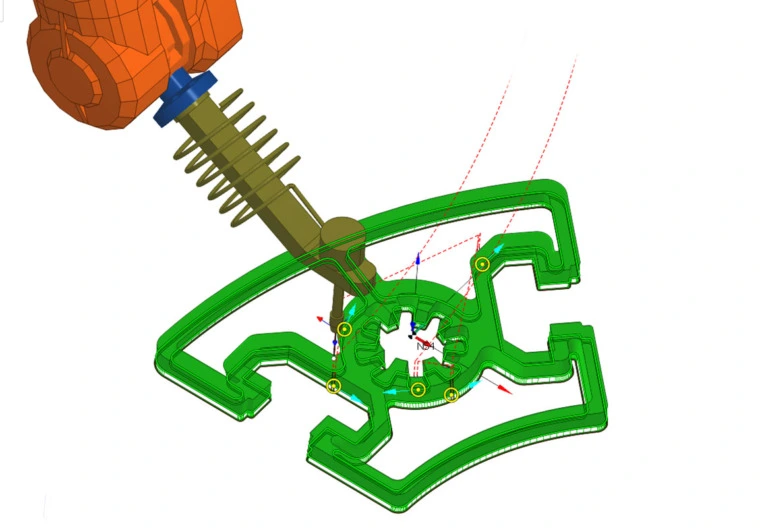

Dopasuj ścieżkę narzędzia
Zaawansowany zestaw narzędzi do modyfikacji wieloosiowej ścieżki narzędzia
Precyzyjna kontrola wektora narzędzia w każdym punkcie ścieżki narzędzia. Wprowadź prowadzenie i kąt pochylenia za pomocą interaktywnych możliwości edytowania
Wybierz dowolną część ścieżki narzędzia i wykonaj przesunięcie wzdłuż X, Y lub Z. Edycja w trybach splajnu i polilinii jest dostępna.
Wybierz dowolną część ścieżki narzędzia i dostosuj posuw. Tworzenie płynnych przejść pomiędzy różnymi strefami posuwu ścieżki narzędzia.
Kontrola kątów pochylenia i wodzenia poprzez mapę osi robota. Ustawianie kąta pochylenia, kąta prowadzenia lub obu w dowolnej części ścieżki narzędzia.
Zmień narzędzie, przełącz kierunek cięcia i naciśnij Uruchom, a otrzymasz nową ścieżkę. Nie wymaga przeprogramowania.
Wybierz pomiędzy łukami przestrzennymi a liniami. Określ maksymalne odchylenie lub długość.
Kontroluj płynność ruchów robota oraz dopuszczalne przyspieszenia i prędkości każdej osi za pomocą wykresu osi robota.

Optymalizacja
Obsługuj osobliwości, kolizje, ograniczenia strefy zasięgu i nadmiarowe ruchy osi za pomocą dedykowanego, potężnego narzędzia: mapy osi robota.
Osie dostępne na mapie osi robota:
A6 (6 oś), szyny, stół skrętny, kąty prowadzenia i pochylenia.
Co widać na mapie:
Poza zasięgiem, poza granicami, osobliwości, kolizje. Mapa pokazuje również ścieżkę narzędzia z szybkimi i roboczymi posuwami.
Zautomatyzowane:
Wystarczy nacisnąć “Buduj automatycznie”. I to działa w większości przypadków.
Precyzyjna kontrola:
Edytuj dowolny punkt ścieżki narzędzi za pomocą podglądu symulacji w czasie rzeczywistym.
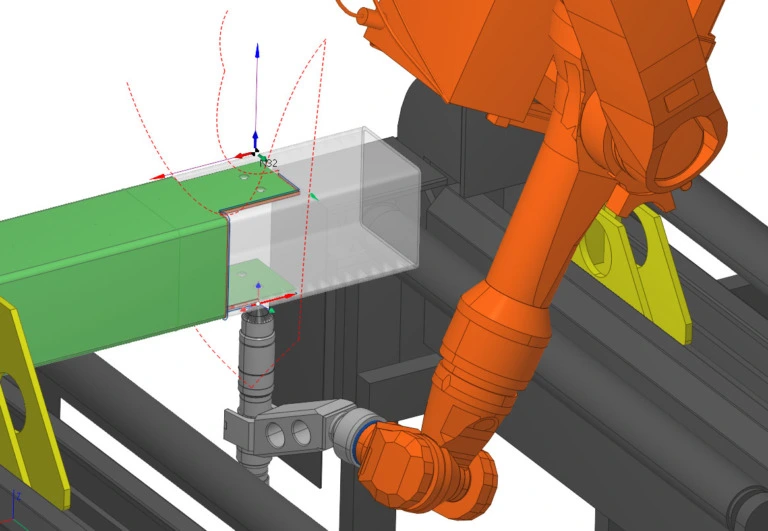
Symulacja
Pełna symulacja ścieżek zrobotyzowanych. Symulacja usuwania materiału, zawiera płynną symulację w wysokiej rozdzielczości.
Pełna symulacja ścieżek zrobotyzowanych:
Robot, stoły, szyny, end effector, ogrodzenia, uchwyty, magazyn narzędzi i każda inna importowana geometria jest używana do symulacji.
Usuwanie materiału, addytywny, malowanie:
Dedykowane tryby symulacji usuwania materiału, addytywnego i malowania w celu kontroli wyników.



Przykłady cięcia/przycinania/gratowania robotami
Projektowanie parametryczne – zrobotyzowane przycinanie
specjalnych wzorów, partner SprutCAM, Australia
Kompleksowe przycinanie
robotów Special Patterns, partner SprutCAM, Australia
Zrobotyzowane przycinanie włókna węglowego
Special Patterns, partner SprutCAM, Australia
SprutCAM China
Przycinanie włóknem szklanym za pomocą KUKA KR2150
Velichko Velikov, partnera SprutCAM, Wielka Brytania
Przycinanie
mebli GD ROBOTICS, partner SprutCAM, Turcja